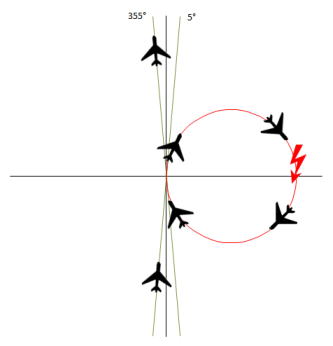
Der Grund für diesen Fehler ist offenbar ein mathematischer Algorithmus, der den 180°-Übergang unkorrekt behandelt. (Übrigens kann ein ähnliches Verhalten mitunter auch beim 360°-Übergang beobachtet werden.) In dem Beispiel oben ist es nur ein seltsamer Effekt, den man mit einem Grinsen ignorieren könnte. Aber stellen Sie sich einen Autopiloten vor, der ein Flugzeug oder Schiff steuert. Nehmen wir an, er soll eine kleine Kursänderung nach Backbord machen, sagen wir von 5° nach 355°. Aufgrund eines Software-Fehlers macht das Fahrzeug stattdessen einen (Fast-)Vollkreis von 350° nach Steuerbord. Das könnte zu ernsthaften Problemen führen, sogar zu einem Zusammenstoß, falls sich dort ein Hindernis befindet.
Die mathematische Lösung für korrektes Verhalten ist folgende: Man verwendet immer Winkel-Differenzen, die auf einen Bereich von +/- 180° normalisiert werden. Diese Deltas können für weitere Berechnungen verwendet werden, z.B. zum Filtern. Das Endergebnis wird dann wieder zurück gerechnet, diesmal auf den Bereich von 0°...360°. Klingt kompliziert, ist aber in Wirklichkeit sehr einfach. Und es liefert immer korrekte Ergebnisse.