Sensor Recording
Discover your Android Smartphone!
Readout, display and record smartphone sensor data

Sensor Recording - Search
Search (and find) a previously stored position, e.g. a car on a large parking area.
This function shows continuously the direction and distance to the wanted place.
By entering a description inside the white field, the current position can be named and taken
over as position to go. If there is no current position, the center of the map is used instead.
With the spinner below, a previously saved position can be selected as the new target position.
The target can be renamed with the pencil, the target can be moved to the new center of the
map (crosshairs) with the meeting point symbol, the recycle bin allows the selected target
to be deleted or toggled (text green = visible / yellow = invisible).
Invisible targets are not displayed in the menus "Track" and "Map" - except for the
currently selected target.
After "Stop Sensors", the last 5 positions for the menu "Search" are stored automatically
on top of the list.
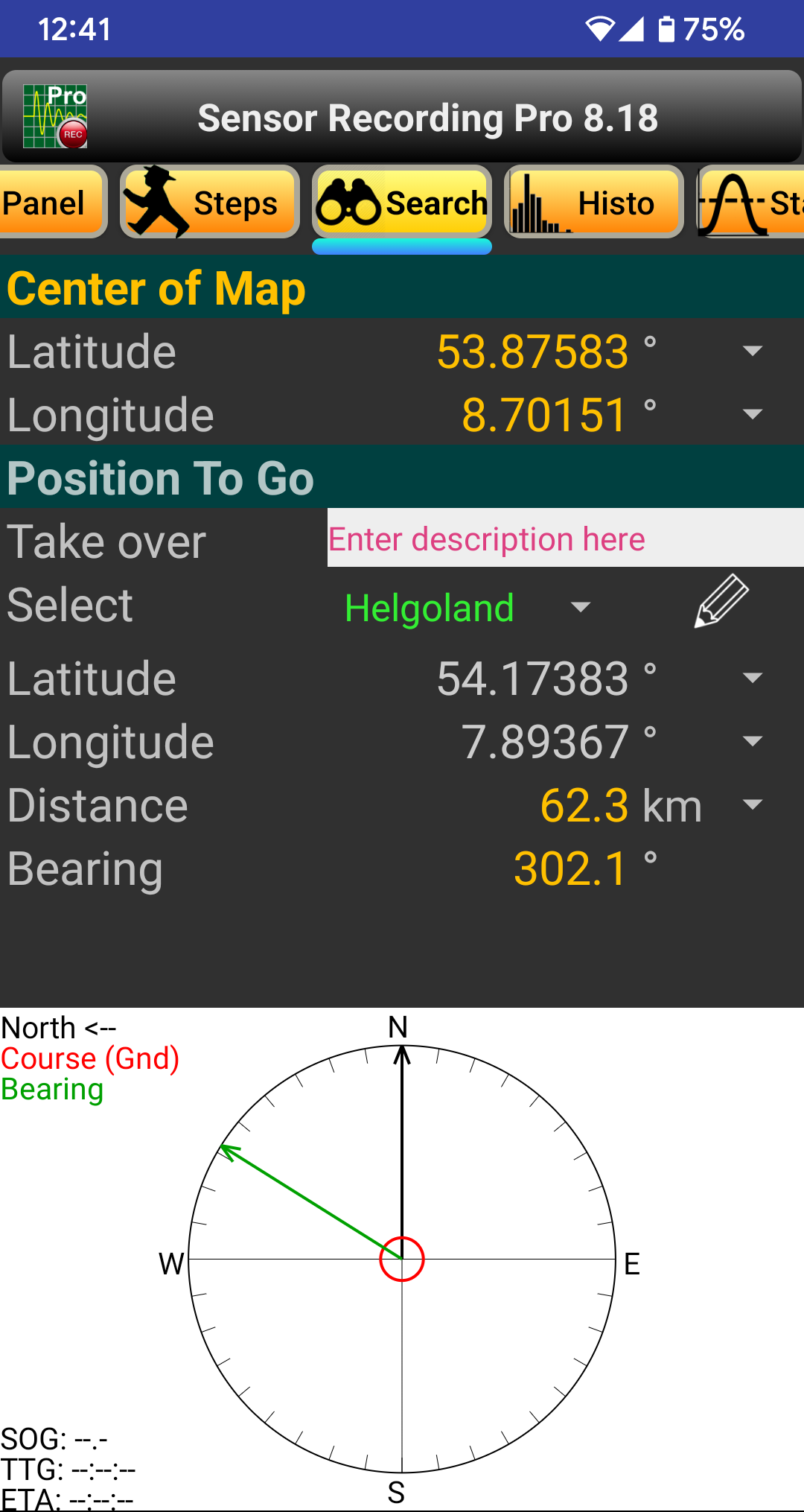
The display contains some numerical data and a graphic. This shows a compass rose,
including a speed vector (showing the course over ground) and a bearing vector, which
points into the direction to go. The length of the respective vector depends upon
the speed or the distance to go, respectively. The functioning of the compass rose requires
that sensor 3 (orientation) is switched ON.
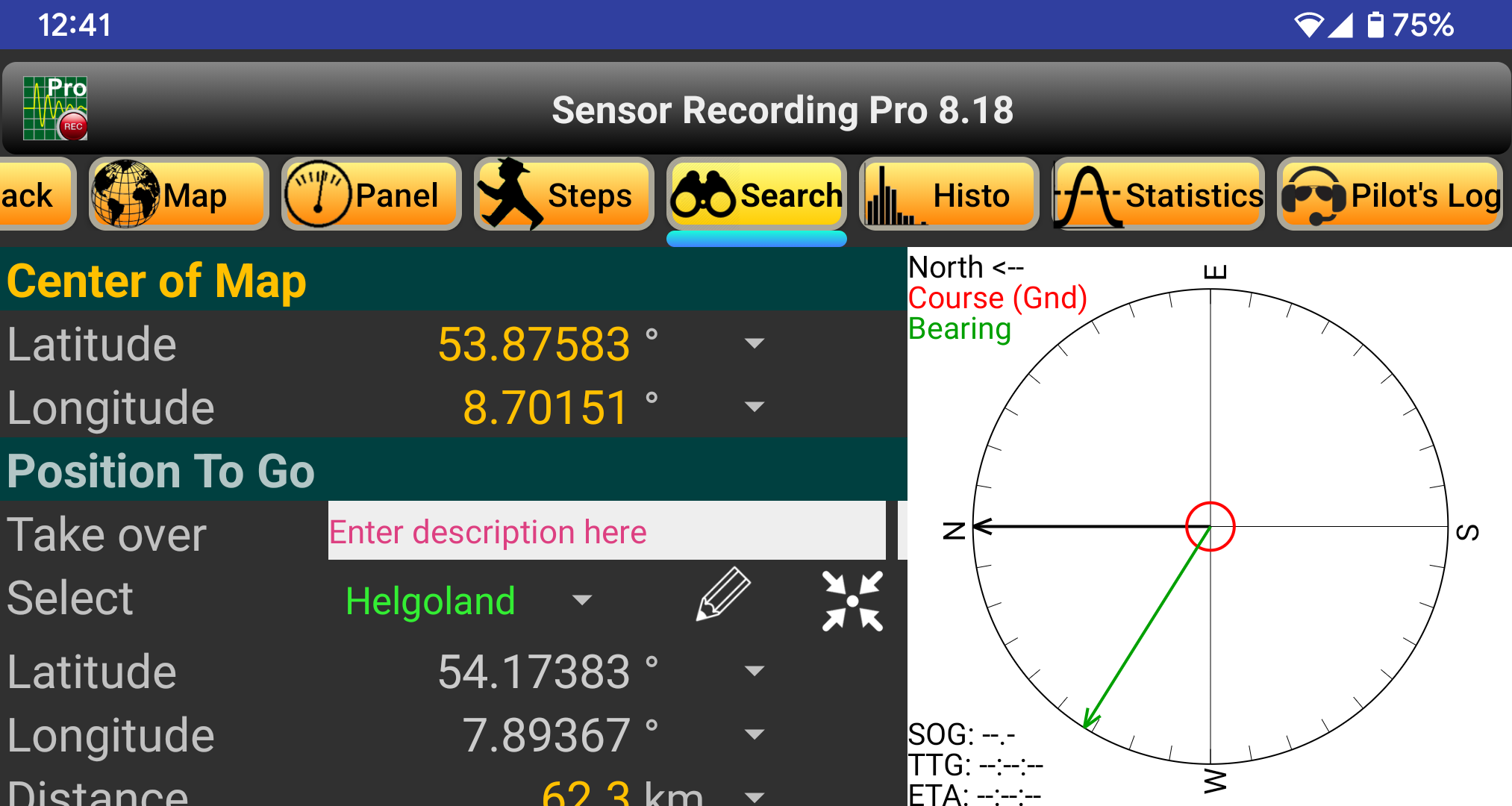
Please note that the compass rose is adjusted according to the orientation of the
smartphone, which in turn is measured by the magnetic sensor. However, the magnetic field
may be interfered inside a vehicle. Therefore, the orientation of the graphic switches
to the course over ground vector, if the speed exceeds a certain threshold
(30 km/h).
The graphic field contains some additional information: SOG=Speed Over Ground,
TTG=Time To Go, ETA=Estimated Time of Arrival. These figures only make sense,
if you are moving with constant speed directly towards your destination.